Programmation scientifique en Python
Ce cours s'adresse aux étudiants en master 2 qui souhaitent acquérir des bases de programmation pour les sciences, en particulier pour le calcul numérique et la visualisation grâce à la bibliothèque scientifique NumPy et à la bibliothèque graphique matplotlib et les bibliothèques Pandas et Scikit-learn etc...

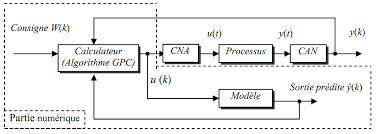
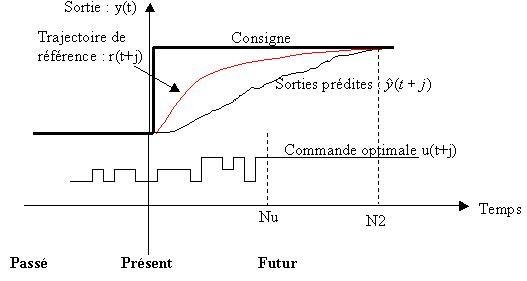
Commande Intelligente
L’objectif étant de mettre le point sur les techniques de commande
basées sur les outils de l’intelligence artificiels, afin de donner une
base théorique indispensable à la compréhension de ces approches et à
leurs utilisations dans le domaine de la commande des processus
industriels.
Ce cours est devisé en deux parties:
– Partie I: Logique floue
– Partie II: Réseaux de neurones
Partie 1 : Logique floue
- Chapitre 1. Introduction à la théorie des ensembles flous
- Chapitre 2. Raisonnement flou
- Chapitre 3. Modélisation floue et systèmes d’inférence floue
- Chapitre 4. Commande floue
Partie 2 : Réseaux de neurones
- Chapitre 1. Introduction sur les réseaux de neurones
- Chapitre 2. Modélisations (modèle de Mac Culloch et Pitts, Modélisation générale, Le perceptron, Algorithmes/techniques d’apprentissage)
- Chapitre 3. Réseaux multicouches.
- Chapitre 4. Application des réseaux de neurones.
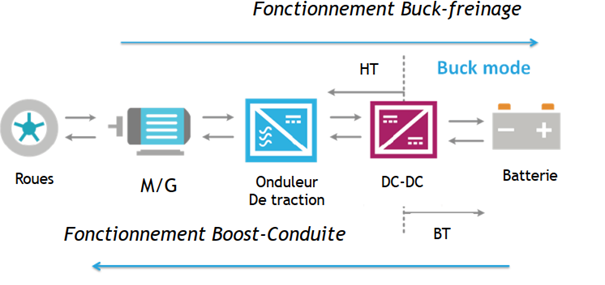
Véhicules électriques
Dans cette partie, on explique les différents types des convertisseurs de puissance utilisé
dans les véhicules électriques

TD commande des robots de manipulation
Publique cible: ce cours est destiné aux étudiant de Master 1 en Automatique spécialité Automatique et systèmes
Objectifs de l’enseignement : Ce cours a pour objectif de permettre aux étudiants de maîtriser les outils de modélisation et les techniques de contrôle des robots manipulateurs.
Il vise à donner aux étudiants la possibilité d’entreprendre en toute autonomie la résolution d’un certain nombre de problèmes élémentaires de robotique comme la mise en configuration, la génération de trajectoires, la commande dynamique
Connaissances préalables recommandées :
- Automatique linéaire et asservissement.
- Notions de base en : cinématique et dynamique.
TP Commande des robots de manipulation
Travaux pratiques du module commande des robots de manipulation
Commande des robots de manipulation
Ce cours a pour objectif de permettre aux étudiants de maîtriser les outils de modélisation et les techniques de contrôle des robots manipulateurs. Elle vise à donner aux étudiants la possibilité d’entreprendre en toute autonomie la résolution d’un certain nombre de problèmes élémentaires de robotique comme la mise en configuration, la modélisation des robots, la génération de trajectoires, la commande dynamique
Connaissances préalables recommandées :- Automatique linéaire et asservissement.
- Notions de base en : cinématique et dynamique.
Systèmes temps réel
Le cours système s'articule autour de quatre chapitres: les deux premiers chapitres introduisent la définition d'un système de contrôle-commande, la représentation schématique de l’interaction du procédé physique piloté et du système de contrôle-commande, les caractéristiques temporelles des systèmes de contrôle-commande, l’architecture logicielle d’une application de contrôle-commande multitâche ainsi que le noyau temps réel. Le troisième chapitre présente la définition des threads et les fonctions de gestion des threads. Le quatrième chapitre présente la synchronisation des threads avec les sémaphore et les mutex.